You will recall that in my initial sensing application I failed to check to see if I could detect buttsex. Well, I am pleased to report that I have progressed somewhat from that! It took a while for me to work up the nerve, because my mold is a little thick and it’s been a while, if you know what I mean.
Anyway, science and a little boredom gave me the opportunity to test the insertable toy with all three gestures I wanted to detect.
You may recall that a hand job is quite unique with very clear signals from all of the sensors:
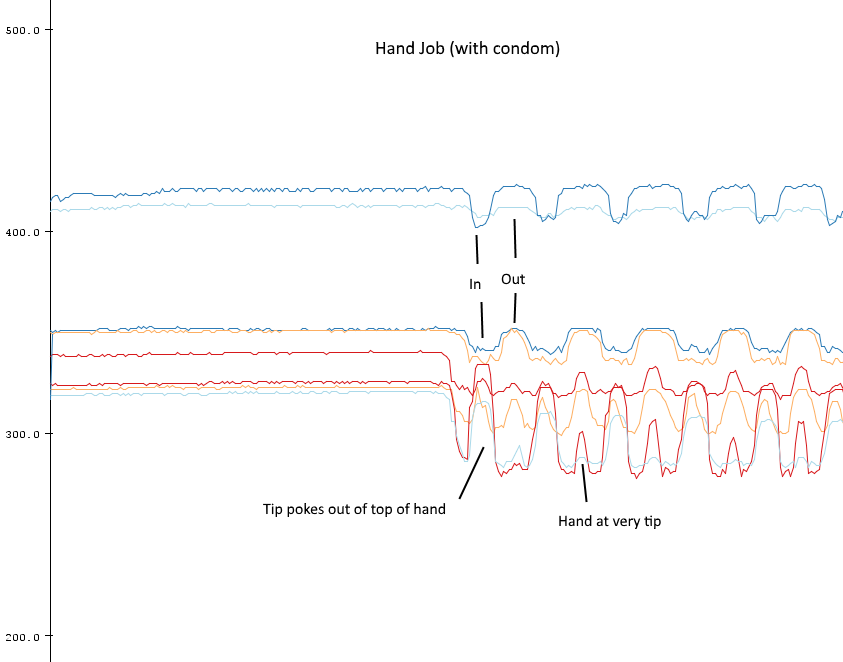
What is especially unique about the hand job is typically the hand can’t stimulate the entire shaft when it’s fully “in” this results in the tip of the toy poking out of your hand. Even if you had a particularly large hand, i would hazard that because of the shape of your hand, the tip would still lose stimulus at the peak of the “in” stroke.
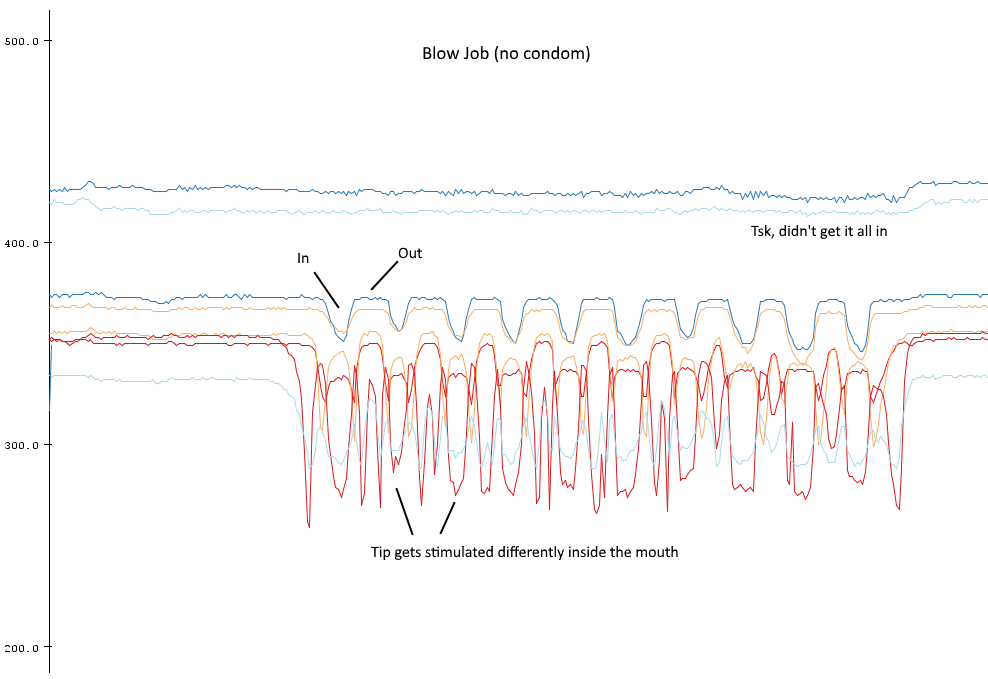
A blow job is similar except that the tip gets stimulated in varied and complex ways when it enters the mouth, likely due to saliva. Also, I personally wasn’t about to uniformly stimulate the base of the shaft with my mouth alone.
Finally, the data you have all been waiting for. Insertion into the butt looks like so:

Note that it’s a very different story to the previous two data sets. the tip is stimulated on entry and is essentially always stimulated throughout. This is even when I withdrew it as far as I dared. I think this is because even when it’s no longer inserted, your body is still close enough to the device to act as a capacitive body, even without direct contact or pressure.
With the above data I was able to crudely detect the difference between a hand job and butt stuff using the DTW algorithm “most of the time”. Evidence suggests I will need to improve my normalisation algorithm because in cases where a dataset is “flat” (e.g. as in the butt stuff), the normalisation tends to unnecessarily amplify noise, which can result in false positives. I also suspect that the 8 point moving average might be a little too aggressive.